
Un dedo robótico podría realizar su próximo examen físico íntimo
USTC/Hongbo Wang
Unos investigadores han creado un «dedo» robótico ultrasensible que imita el tacto humano, capaz de realizar con seguridad exámenes físicos rutinarios similares a los que llevan a cabo los médicos. Creen que este «robodoctor» podría aparecer pronto en las clínicas médicas.
Los médicos utilizan sus dedos como herramientas de diagnóstico para obtener información sobre la salud. Los profesionales de la medicina utilizan sus dedos para tomar el pulso, palpar bultos anormales bajo la piel y realizar exámenes en zonas, digamos, menos visibles por razones de diagnóstico.
Investigadores del Departamento de Maquinaria de Precisión e Instrumentación de Precisión de la Universidad de Ciencia y Tecnología de China (USTC) han desarrollado un «dedo» robótico flexible de inspiración humana para realizar exámenes médicos rutinarios como los mencionados anteriormente.
«La exploración física es uno de los métodos más accesibles, eficaces y seguros para detectar signos precoces de bultos y otros indicadores de cáncer de mama», explican los investigadores. «En la medicina tradicional china, los médicos pueden tomar el pulso de un paciente en la muñeca para evaluar su salud cardiaca».
La necesidad de la palpación robótica
«Por un lado, la escasez de médicos formados y con experiencia puede hacer que algunas enfermedades o riesgos pasen desapercibidos, lo que conduce a un empeoramiento de las condiciones. Por otro, muchas personas, sobre todo cuando las examina un médico del sexo opuesto, son reacias a someterse a exámenes físicos. Esto ha despertado un gran interés en la palpación robótica dentro de la comunidad investigadora».
Dada la complejidad de la mano humana, incluso los sistemas robóticos más avanzados se quedan cortos a la hora de replicar sus capacidades. Por eso, que el equipo del USTC haya desarrollado un dedo robótico blando con una sensibilidad táctil comparable a la humana para detectar anomalías, junto con la propiocepción -el conocimiento del movimiento y la posición del cuerpo- es un logro significativo.
Wang et al.
El diseño del dedo blando bioinspirado (BSF)
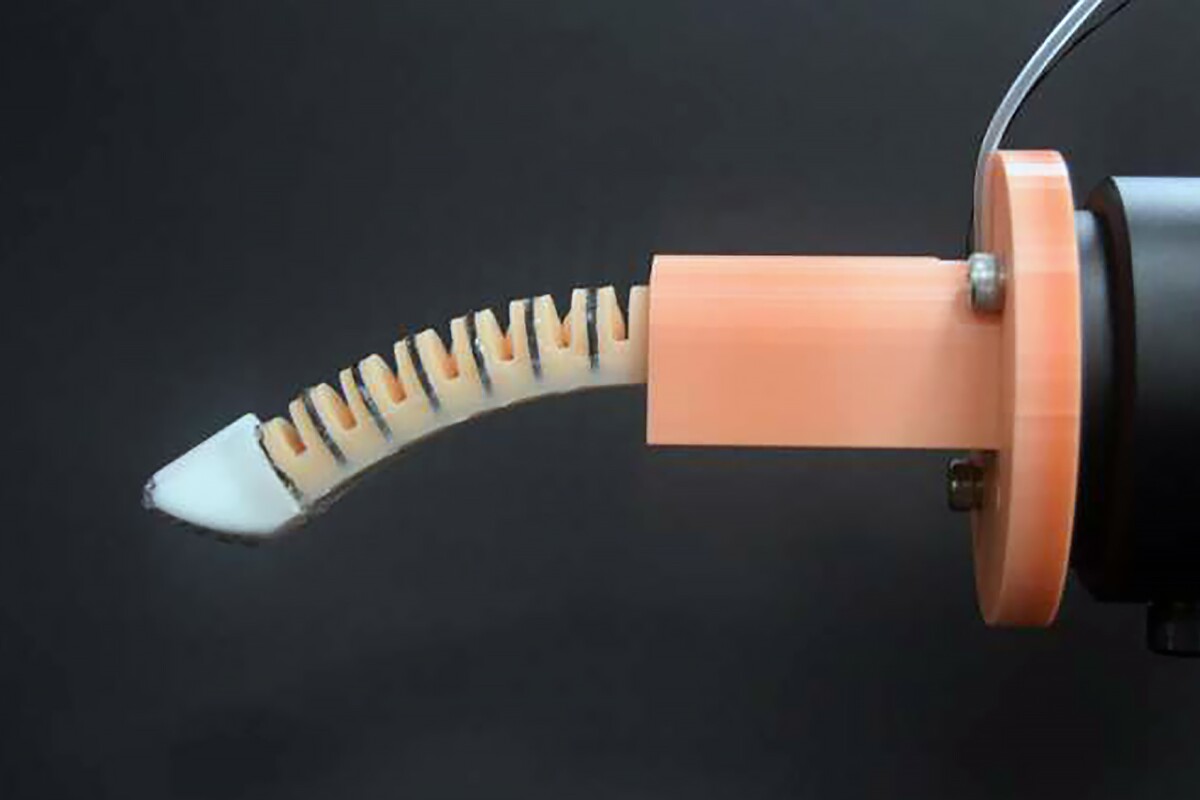
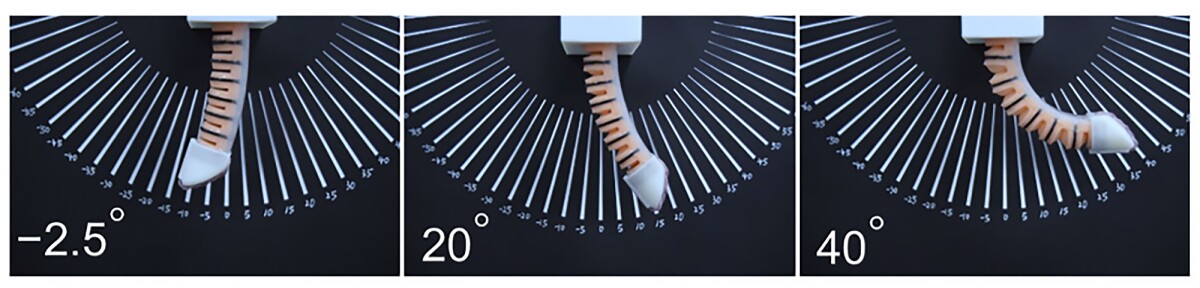
El BSF, abreviatura de bioinspired soft finger (dedo blando bioinspirado), presenta un cuerpo de accionamiento por flexión y detección multimodal integrada. Tiene un diseño semicircular en forma de dedo con una estructura PneuNet (redes neumáticas), que es un tipo de actuador blando formado por canales y cámaras dentro de un elastómero. Cuando se presuriza, las cámaras de aire se expanden, haciendo que el BSF se doble hacia dentro. El dedo entero mide 129 mm (5,08 pulgadas) de longitud.
«El BSF tiene un diseño sencillo que sólo requiere medir la resistencia y la inductancia en dos puntos para lograr una sensibilidad táctil similar a la humana», afirman los investigadores. «Al igual que un dedo humano, puede recopilar información detallada sobre las propiedades físicas de un objeto mediante el tacto activo».
El equipo probó la capacidad del BSF para realizar palpaciones médicas similares a las de un médico. Fue capaz de detectar e identificar bultos modelo dentro de un tejido simulado en un área extensa. Además, el «robofinger» localizó con éxito una arteria en la muñeca de un participante humano y midió su pulso. Sin embargo, el estudio no menciona si el dedo se utilizó para algún procedimiento invasivo.
«Demostramos que el BSF puede presionar y ‘sentir’ la rigidez de los objetos, realizando una palpación robótica segura y precisa como la de un médico», afirman los investigadores. «Además, montado en un brazo robótico de seis grados de libertad, el BSF fue capaz de localizar una arteria en la muñeca de un participante y medir pulsaciones para analizarlas en tiempo real. Estos resultados subrayan el potencial de un ‘robodoctor’ para futuros exámenes físicos».
Al menos, el BSF no sufrirá el problema de las manos frías.
Read the original article on: New Atlas
Read more: A Soft Robotic Glove Restores Grip Strength to Weakened Hands









