
Un robot que salta sobre un asteroide supera la prueba del avión a gravedad cero
ETH Zúrich
Un robot con tres patas podría atravesar pronto la superficie de los asteroides en busca de minerales valiosos. Bautizado con el nombre de SpaceHopper, el robot ha sido sometido recientemente a pruebas durante un vuelo en gravedad cero.
La iniciativa SpaceHopper despegó hace dos años y medio como un proyecto de investigación estudiantil en la Universidad ETH de Zúrich (Suiza).
Exploración de cuerpos celestes de baja gravedad
Su objetivo es explorar objetos celestes de baja gravedad, como asteroides y lunas. Estos cuerpos albergan reservas potenciales de materiales vitales, como metales de tierras raras, y ofrecen información sobre los orígenes del universo.
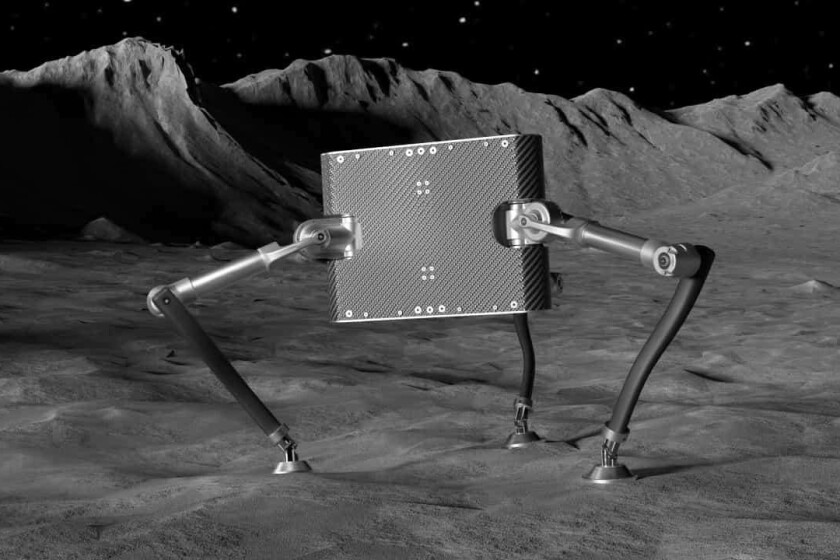
El robot SpaceHopper, en su forma actual, presenta un armazón triangular de aluminio aeroespacial con patas articuladas en cada vértice. Cada pata incorpora una articulación de rodilla y cadera, con dos motores que impulsan la cadera mediante un sistema de accionamiento diferencial, y otro motor que controla la rodilla.

ETH Zúrich/Jorit Geurts
El software de a bordo, basado en el aprendizaje profundo, orquesta las acciones coordinadas de las patas, lo que permite al robot ejecutar una serie de tareas definidas. Estas tareas abarcan iniciar saltos, garantizar la alineación adecuada del robot durante el vuelo y ejecutar aterrizajes controlados en puntos designados.
Durante la fase de salto, los nueve motores de las patas colaboran para propulsar el SpaceHopper hacia arriba desde la superficie del asteroide. Mientras está en el aire, el robot ajusta su posición extendiendo o retrayendo las patas de forma selectiva para gestionar su centro de masa. Al aterrizar, las patas se flexionan para absorber el impacto y mantener la estabilidad del robot, evitando que vuelque.
Pruebas de laboratorio en un entorno simulado de baja gravedad
Las primeras pruebas de estas capacidades tuvieron lugar en un laboratorio de la ETH de Zúrich, donde se fijó el robot a un contrapeso y un cardán giratorio para reproducir el entorno de baja gravedad del planeta enano Ceres.
Sin embargo, a finales del año pasado, miembros del equipo de estudiantes tuvieron la oportunidad de acompañar al SpaceHopper en un vuelo parabólico Air Zero G organizado por la Agencia Espacial Europea y la empresa francesa Novespace. En estos vuelos, un avión Airbus A310 ejecuta una secuencia de arcos ascendentes y descendentes, induciendo breves periodos de ingravidez en el interior del avión.

Nicolas Courtioux
Durante el vuelo de 2023, el robot se impulsó constantemente desde el suelo del avión en una dirección predeterminada y mantuvo la alineación correcta mientras estaba en el aire. Los momentos más significativos de estas pruebas se muestran en el vídeo adjunto.
Merece la pena mencionar que un proyecto anterior de un equipo de la ETH de Zúrich dio lugar a la creación de un robot cuadrúpedo explorador de asteroides llamado SpaceBok. La configuración del SpaceHopper con tres patas pretende minimizar el tamaño y el peso en comparación con el diseño del SpaceBok. De hecho, con un peso total de sólo 5,2 kg, el robot podría transportarse y desplegarse desde un satélite CubeSat compacto no tripulado.
Read the original article on: New Atlas
Read more: An Omnidirectional Robot Moves by Scooting, Shuffling, Climbing









