
Manta raya robótica aerodinámica nada más rápido con un diseño simplificado y eficiente

Haitao Qing, NC State University
Hace sólo dos años, una diminuta manta raya robótica batió el récord como el robot de cuerpo blando que nadaba más rápido. Ahora, su sucesora mejorada ha batido ese récord con un menor consumo de energía.
El robot original, de 22,8 mm de longitud, fue desarrollado por el profesor adjunto Jie Yin y su equipo de la Universidad Estatal de Carolina del Norte. Tenía dos alas flexibles de poliéster parecidas a las de una manta raya, formadas por una única estructura curva biestable. La biestabilidad permite a una estructura mantener dos posiciones estables sin necesidad de energía, como una pinza de pelo que pasa de un estado abierto a otro cerrado.
Un innovador mecanismo de accionamiento permite una velocidad de nado récord
La estructura de alas biestables del robot estaba flanqueada por actuadores neumáticos de silicona blanda. Cuando el actuador superior se hinchaba, se doblaba hacia arriba, tirando de la estructura de las alas para encajarlas hacia abajo. Al desinflar el actuador superior e inflar el inferior, se invertía el movimiento y las alas se rompían hacia arriba. Este accionamiento alternativo permitió al robot nadar a una impresionante velocidad de 3,74 longitudes corporales por segundo, unas cuatro veces más rápido que cualquier robot nadador de cuerpo blando anterior.
El nuevo diseño de 68 mm de longitud simplifica y mejora este sistema. El equipo de Yin eliminó la estructura biestable y el actuador inferior, sustituyéndolos por un diseño de alas monoestable. Ahora, las alas adoptan por defecto una posición curvada hacia abajo cuando están en reposo. Un único actuador neumático superior infla las alas hacia abajo y confía en la fuerza de recuperación elástica de la estructura para volver a subirlas cuando se desinflan.

Eficiencia mejorada: El diseño aerodinámico duplica la velocidad y reduce el consumo de energía
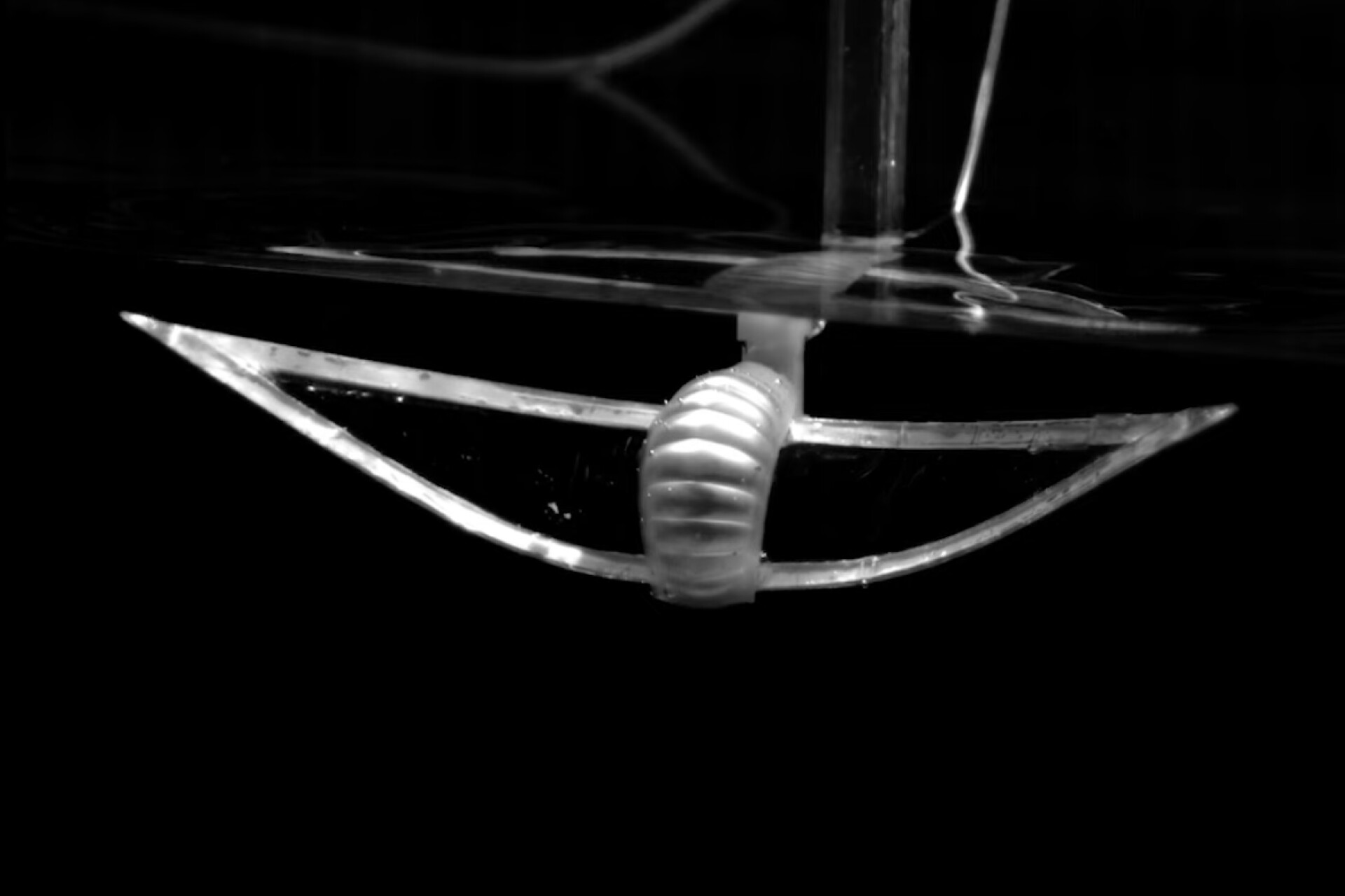
Este mecanismo aerodinámico reduce el consumo de energía, ya que sólo se necesita un actuador por ciclo de aleteo. Como resultado, el nuevo robot alcanza una velocidad media de natación de 6,8 longitudes corporales por segundo -casi el doble de la velocidad original- y consume 1,6 veces menos energía.
Además, el diseño actualizado permite el movimiento vertical variando la velocidad de natación. Cuando aletea despacio, el robot pasa más tiempo con las aletas en reposo, lo que reduce la flotabilidad al vaciarse la cámara de aire. Un aleteo más rápido mantiene la cámara de aire llena durante más tiempo, lo que aumenta la flotabilidad.
Según Haitao Qing, estudiante de doctorado y autora principal del estudio, esta característica podría tener aplicaciones prácticas. El equipo está desarrollando ahora un mecanismo de dirección y prevé usos futuros como la exploración oceánica y la observación de la fauna acuática.
La mayor eficacia y versatilidad del robot suponen un importante paso adelante en la robótica blanda, como se muestra en el vídeo de demostración que figura a continuación.
Read Original Article: New Atlas
Read More: Scitke









