
Ingenieros crean un robot volador propulsado a reacción para responder a catástrofes

Imagínese que está herido en un remoto sendero de montaña y ha contactado con los servicios de emergencia. Si la investigación italiana tiene éxito, un pequeño robot humanoide con una mochila propulsora podría ser el primero en llegar hasta usted.
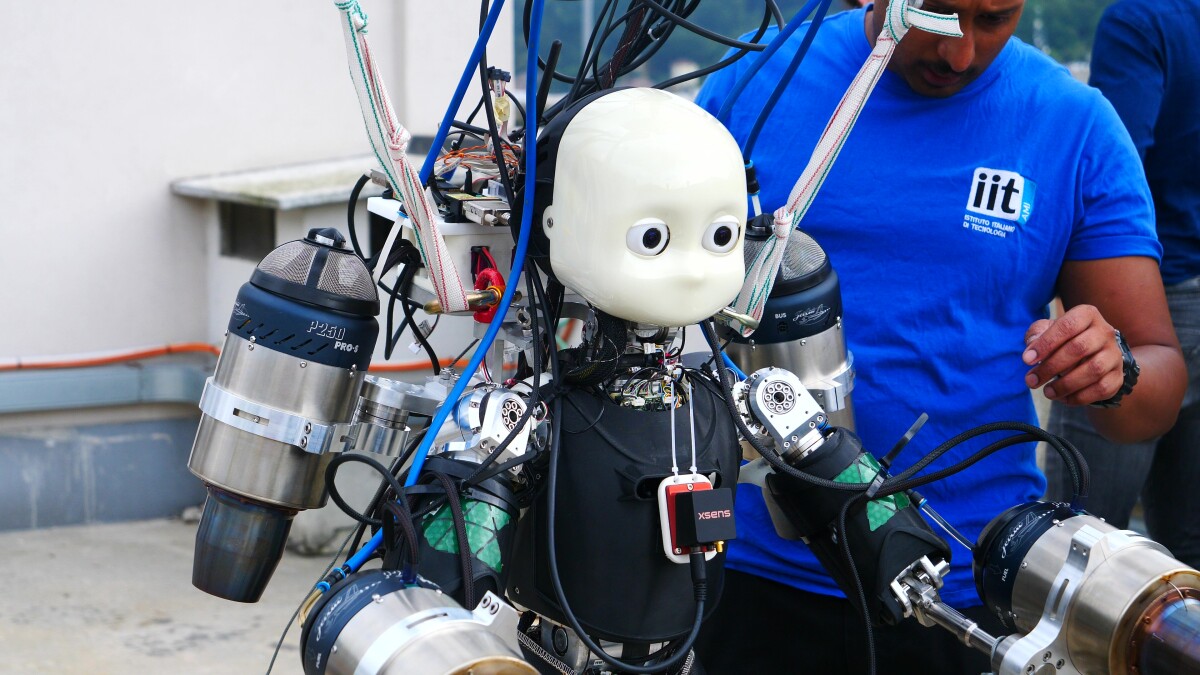
Este proyecto, desarrollado por el grupo de Inteligencia Artificial y Mecánica del Instituto Italiano de Tecnología, se centra en conseguir que el iCub, un bípedo del tamaño de un niño diseñado originalmente para la investigación de la inteligencia artificial, vuele por el aire utilizando propulsión a chorro.
Mejoras del diseño humanoide con propulsión a chorro
Además de acoplar una mochila propulsora doble a la espalda del robot, el equipo sustituyó las manos flexibles originales, similares a las humanas, por motores a reacción adicionales, conocidos como JetCats. Según los investigadores, estos motores pueden producir un empuje máximo de 1.000 N (aproximadamente 225 lbf) y alcanzar temperaturas de escape de hasta 800 °C (1.472 °F).
Mejoras para mayor resistencia y durabilidad
El iRonCub3, inspirado en Tony Stark, ha sido mejorado con una columna vertebral de titanio de nuevo diseño para soportar las fuerzas a las que se enfrentará y ahora cuenta con cubiertas resistentes al calor en lugar del elegante traje exterior utilizado en un prototipo anterior.
El equipo también ha diseñado nuevos componentes electrónicos, ha instalado sensores de fuerza-par en el jetpack y ha eliminado algunos componentes para adaptar el sistema actualizado.
Como puede verse en el vídeo, el proyecto se encuentra aún en sus primeras fases de desarrollo. Sin embargo, el equipo ya ha probado el humanoide propulsado por reactores en un túnel de viento para verificar las simulaciones aerodinámicas. Aunque los reactores se han activado varias veces, el iRonCub3 aún no ha emprendido el vuelo. A pesar de ello, el equipo confía en que pronto consiga planear.
Además, se han desarrollado y probado algoritmos de control de vuelo y se ha validado mediante simulaciones un planificador de trayectorias. El equipo trabaja ahora en la estimación de la posición y orientación del robot en el espacio utilizando datos de su unidad de medición inercial y una cámara de profundidad RealSense montada en el pecho.
Retos únicos de la robótica propulsada por reactores
«La complejidad de esta investigación es bastante diferente de los retos típicos de la robótica humanoide», señalan los investigadores. La termodinámica es crucial porque el gas de escape de la turbina alcanza unos 800 grados centígrados y casi la velocidad del sonido.
La aerodinámica de los sistemas multicuerpo exige evaluar en tiempo real redes neuronales con componentes informados por la física. La configuración de los controladores debe integrar actuadores de alto y bajo ancho de banda tanto para las articulaciones como para las turbinas, y los planificadores tienen que generar trayectorias no sólo para los motores sino también para las turbinas. La validación experimental es a la vez seria y peligrosa, y deja poco margen para el error.
El objetivo final es desarrollar robots humanoides capaces de volar a lugares de catástrofes o emergencias para realizar inspecciones aéreas o proporcionar datos cruciales a equipos remotos. Estos robots también serían capaces de aterrizar, caminar, sortear obstáculos, subir escaleras, abrir puertas y mucho más. Estas capacidades serían útiles para rescates en fases tempranas y para inspeccionar edificios o infraestructuras peligrosas.
Read the original article on: New atlas
Read more: Video: Google Robot Plays Table Tennis with Humans









